

原文出处: CN102306011B 一种直线运动单元双轴同步控制方法 Inventor 单忠德刘丰侯明鹏 Original Assignee 机械科学研究总院先进制造技术研究中心 Priority date 2011-05-17 如对您的权益有所侵侵犯,请及时联系网站删除. 联系方式: swdaxue@qq.com

技术水平已经标志着国家生产力和工业实力的重要指标。在数控加工设备的发展中,为提升加工系统的产能与加工质量,高速与高精度为成为关键。提升数控加工设备的生产效率,就必须要在有限的行程内提高速度。但随着速度的提升,驱动直线运动单元导轨的驱动力也必然随着增大,在高速进给时,瞬间的驱动力很容易引起振动现象的产生,一旦加工过程中有振动产生,便会导致加工精度的降低,进而影响到工件的加工质量,因此往往无法同时兼顾高速度与高精度的需求。文章源自solidworks教程网-http://gocae.com/3282.html
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
在传统数控加工设备传动结构中,如龙门式横梁机械结构的控制系统,最常用的方法是采用一台电机通过传动链或者同步带等机械机构驱动双边执行机构的方案,但是因传动机构复杂、间隙较大,容易造成闭环控制系统的不稳定。由于驱动系统的结构刚性及惯性匹配不佳容易造成设备瞬间加减速时发生震动现象而且运行噪声大,维护困难。另外若用于负载转动惯量较大的场合,由于传动效率低,必然要选用功率很大的电动机,亦不符合节能绿色制造的设计理念。文章源自solidworks教程网-http://gocae.com/3282.html
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
基于以上因素,数控加工设备在驱动轴的设计上采用双轴同步驱动方式为佳。此方式不但可以增加进给系统的结构刚性,还可以减少因驱动力偏心所引起的力矩影响,双电机同步驱动方式,除了可加强系统的驱动力外,也可提升系统的应答速度。与其他双轴同步控制方法相比,本发明方法结构简单,容易实现,且运行稳定可靠。此外,该方法特别适用于较大负载能力和大跨距的龙门框架结构或者桥式框架结构系统。 solidworks教程网致力于提供机械的行业技术 ,为行业人士建立和拓展全技术能力提供技术服务,是机械行业一个跨屏技术互动应用系统。更多行业技术请关注微信 solidworks教程网文章源自solidworks教程网-http://gocae.com/3282.html
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
数控动柱式龙门加工中心双轴同步控制方法
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
为解决单轴驱动双边电机的速度低,传动机构复杂、间隙较大,系统不稳定等问题以及其他双轴同步控制的方法复杂,难于实现,成本高等问题,提出本发明方法。内容包括 : 1. 一种直线单元运动过程双轴同步控制方法,步骤 : a. 两个运动轴采用相同导轨丝杠形式的执行机构 ; b. 选取相同电机并与控制器连接方式相同 ;c. 两个电机驱动器的输入接口分别与控制器的两个指令输出模块相连 ; d. 将 1 号电机处于断电停止工作状态,使 2 号电机单独接收命令运行。根据负载情况,利用电机驱动器自调节功能记录下该负载状态下的参数情况,参数包括 : 刚性、惯量比、PID、振动检测值、增益 ;e. 再将 2 号电机处于断电停止工作状态,使 2 号电机单独接收命令运行。根据负载情况,利用电机驱动器自调节功能记录下该负载状态下的参数情况,参数包括 : 刚性、惯量比、PID、振动检测值、增益 ;f. 取两组参数中的最大值分别对双轴电机参数进行设定并锁死,同时使电机驱动器的免调节功能有效 ;g. 在上位机软件中同时分别向两个电机发送相同指令。文章源自solidworks教程网-http://gocae.com/3282.html
 文章源自solidworks教程网-http://gocae.com/3282.html
文章源自solidworks教程网-http://gocae.com/3282.html
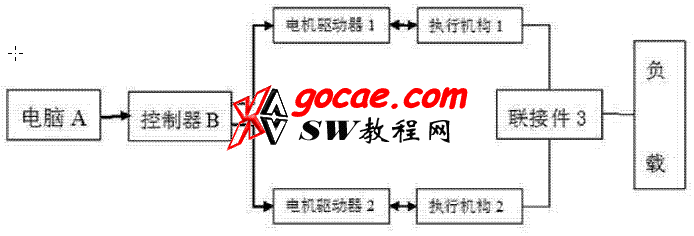
运动控制器 B 的数据信号输入端与电脑 A 的以太网口利用网线连接,控制器 B 的脉冲输出端分别于两个伺服驱动器 1 和伺服驱动器 2 连接。联接件 3 将执行机构 1 和执行机构 2 跨接为一个整体,负载可在联接件 3 上移动。
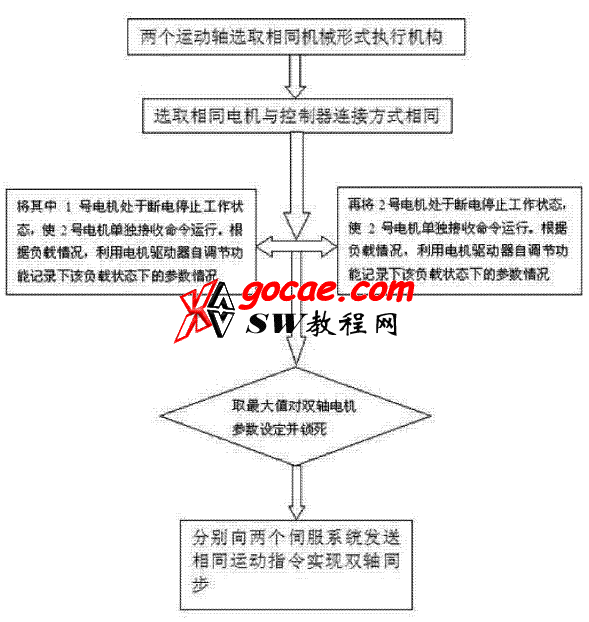
两个运动轴采用相同导轨丝杠形式的执行机构 ;选取相同伺服电机,电机驱动器的信号输入接口分别与运动的控制器的信号输出模块相连,并采用相同的脉冲+ 方向的控制方式 ;将其中 1 号电机的主动力线和编码器线断开使其处于断电停止工作状态,使 2 号电机单独接收命令运行。根据负载情况,利用电机驱动器自调节功能记录下该负载状态下的参数情况 ;再将 2 号电机的主动力线和编码器线断开使其处于断电停止工作状态,使 1 号电机单独接收命令运行。

根据负载情况,利用电机驱动器自调节功能记录下该负载状态下的参数情况 ;取两组参数中的最大值分别对双轴电机参数进行设定使电机驱动器的免调节功能有效 ;在上位机软件中同时分别向两个电机发送相同指令实现同步控制。