原文出处: CN102166750A 定位梁及具有该定位梁的机器人直线运动单元 Inventor 刘丰刘丽敏单忠德陈少凯 Original Assignee 机械科学研究总院先进制造技术研究中心 Priority date 2011-05-16 如对您的权益有所侵侵犯,请及时联系网站删除. 联系方式: swdaxue@qq.com

 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
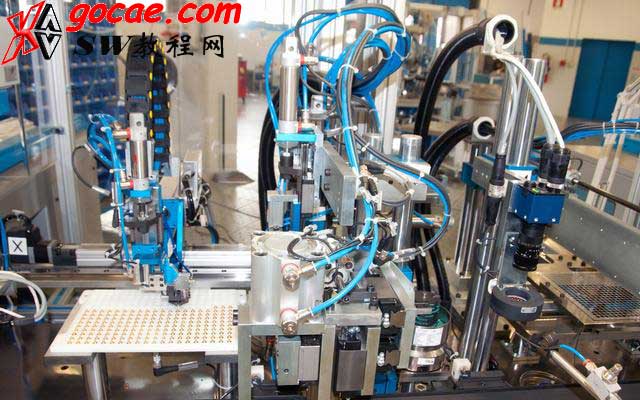
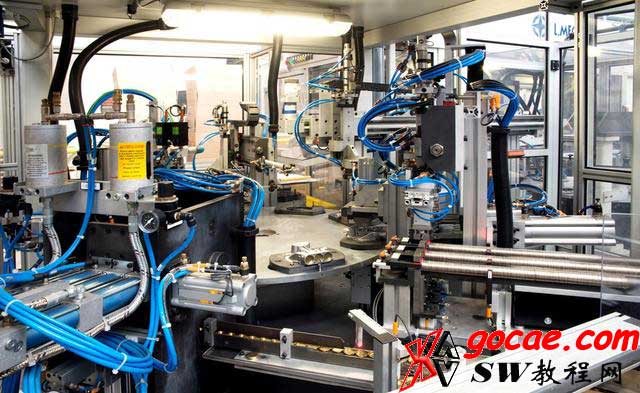
在当今迅猛发展的工业自动化时代里,越来越多的环节需要自动化程度更高的设备来完成,加之人工成本的不断上升,工作环境更高要求,因此,机器人产品就孕育而生。文章源自solidworks教程网-http://gocae.com/3296.html
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
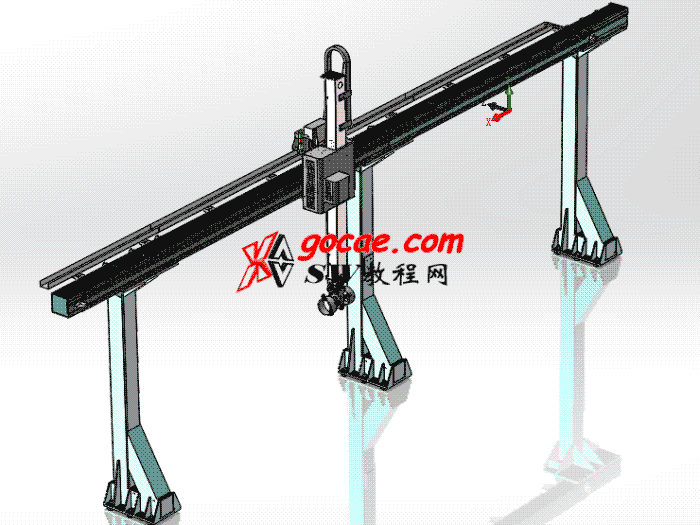
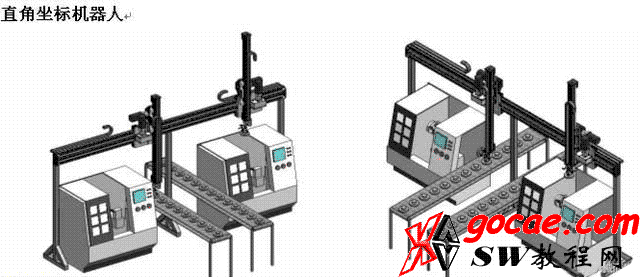
直角坐标机器人,顾名思义,就是一种以空间几何关系沿 XYZ 方向所形成的立体空间作为工作空间的一种工业自动化机器人设备。该设备在工业应用中,可以通过不同的程序进行设定,实现自动控制,形成多用途的操作机。文章源自solidworks教程网-http://gocae.com/3296.html
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
直角坐标机器人
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
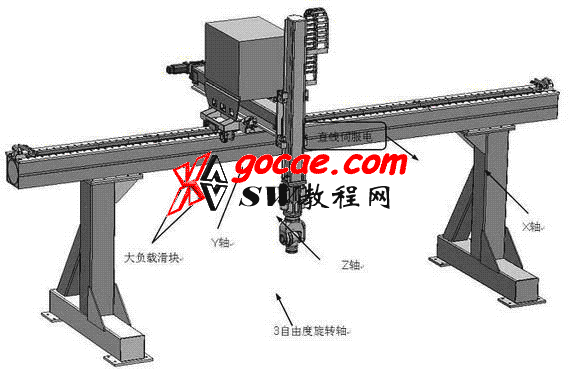
主要有 4 大功能模块构成 :直线运动单元、驱动单元、控制单元以及末端操作单元。为了降低直角坐标机器人的成本,缩短产品的研发周期,增加产品的可靠性以及提高产品性能,欧美的许多国家都已经将直角坐标机器人模块化,而直线运动单元则是模块化中最为典型、最为核心的单元。文章源自solidworks教程网-http://gocae.com/3296.html
 文章源自solidworks教程网-http://gocae.com/3296.html
文章源自solidworks教程网-http://gocae.com/3296.html
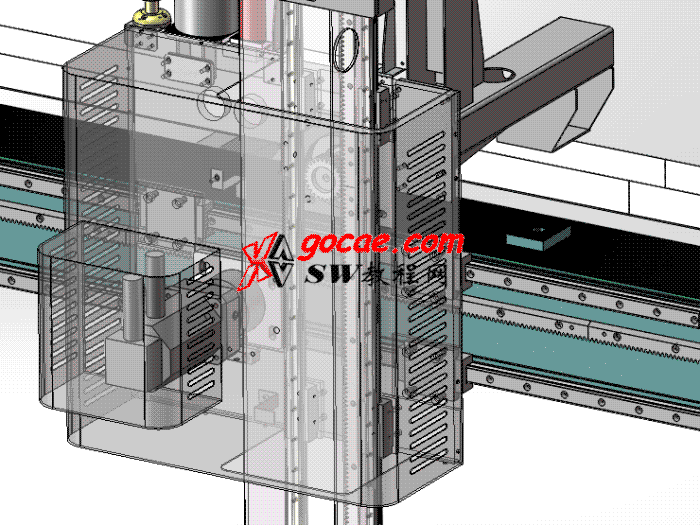
所谓的直线运动单元就是将整个运动元素加之到一个运动整体中,其共包括运动支撑部分 ( 光杠或直线导轨 )、定位体型材部分 ( 各种型号的型材 )、传动部分 ( 同步带轮及同步带或丝杆 ) 以及滑块运动部分 ( 通过同步带或丝杆螺母的拉动而随之运动 )。

solidworks教程网致力于提供机械的行业技术 ,为行业人士建立和拓展全技术能力提供技术服务,是机械行业一个跨屏技术互动应用系统。更多行业技术请关注微信 solidworks教程网
随着科技的不断发展,人们对直角坐标机器人的性能提出高速度、高精度、高可靠性、易操作性和可维修性等更高的要求。
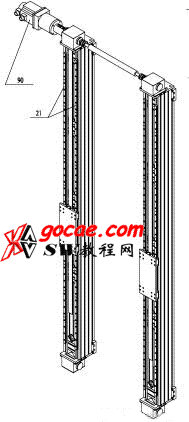
作为其核心单元,直线运动单元的可靠性、稳定性、可操作性以及易维修性等性能更是越来越被科技人员所重视,而直线运动单元性能的提高主要取决于定位体型材部分和运动支撑部分。

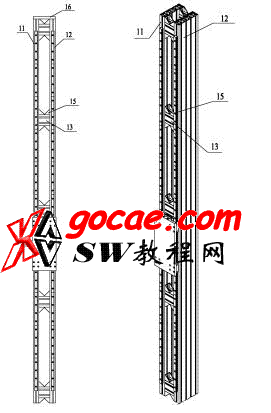
传统的定位体型材部分是在普通铝型材的中间截面上切割出用于装配传动单元的装配空间,运动支撑部分则直接铺设在装配空间内,这样就会破坏掉原有型材的机械结构,当然也就降低了整体结构的机械性能以及力学性能。
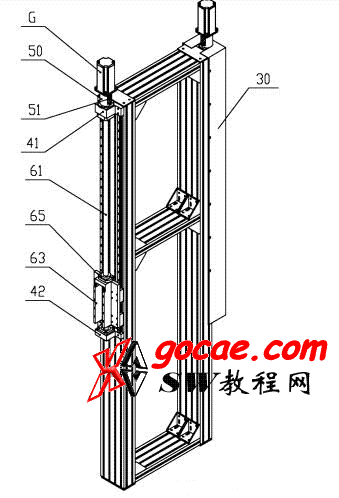
另外,传统的定位体型材部分和运动支撑部分常采用单根铝型材构成悬臂结构,或者采用双根铝型材构成框架结构,通过长期的实践发现,这两种基于铝型材的机械结构都比较容易发生不同程度的挠曲形变以及扭转形变,并在机器人运动速度较高时的抗冲击力也相对较低。
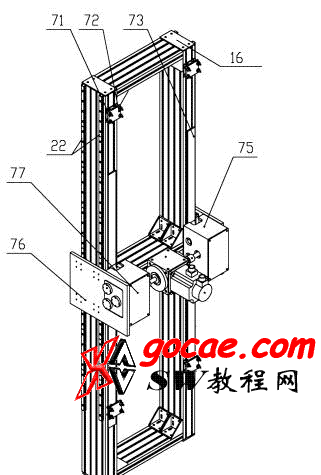
这些对于被要求高性能,高可靠性以及高精度的直角坐标机器人直线运动系统来说是非常致命的。

图纸下载
这里提供一套solidworks原格式的机械手给大家做参考,有需要的可以直接下方购买就行。