

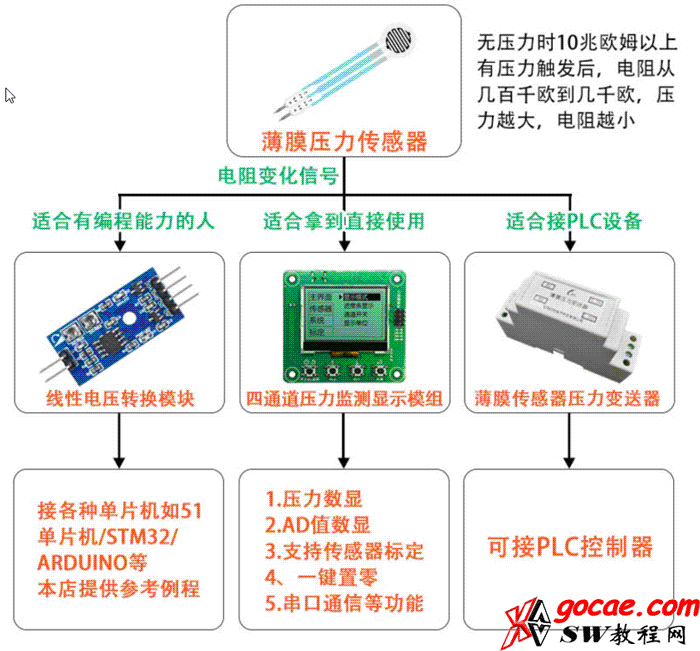
压力传感器基本上是一个可变电阻器。当没有施加压力,两外引线之间的电阻非常大,可能大于1000万欧姆。当施加压力时,电阻会下降,25磅(11.34公斤)的压力,大约是50K欧姆。
简介
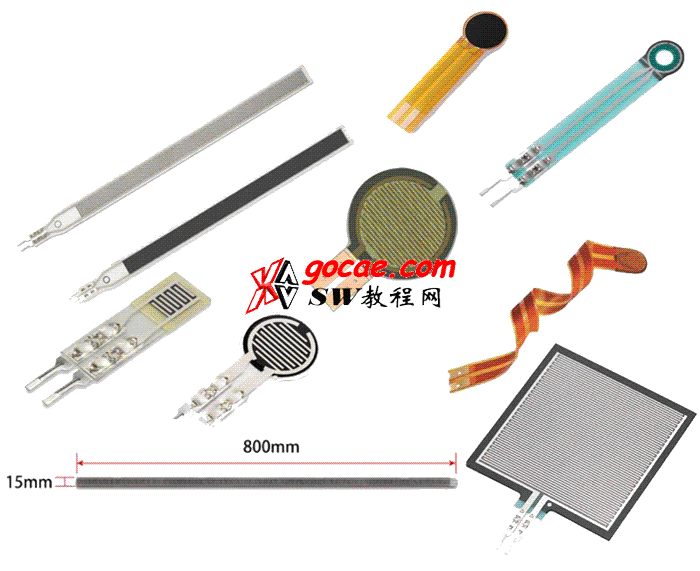
薄膜压力传感器由综合机械性能优异的聚酯薄膜、高导电材料和纳米级压感材料组成。底层是柔性薄膜和复合其上的导电层,顶层是柔性薄膜和复合其上的压感材料。两者通过双面胶贴合,并隔离上下两层的感应区域。当感应区受压时,底层彼此分离的线路导通,金属端口的输出电阻随着压力不同发生相应变化.文章源自solidworks教程网-http://gocae.com/4020.html
 文章源自solidworks教程网-http://gocae.com/4020.html
文章源自solidworks教程网-http://gocae.com/4020.html
工作原理
薄膜压力传感器,工作原理为当传感器静止状态其阻值没有变化;但是当其受到一定压力时,其阻值会产生较大的变化。随着受到的力度的增加,其阻值也会随着剧烈变化,这样设计工程师就可能以此判断其受到一定的压力,同时根据检测到阻值来判断其受到多大的力,为下一步的动作提供有利的分析基础。文章源自solidworks教程网-http://gocae.com/4020.html
 文章源自solidworks教程网-http://gocae.com/4020.html
文章源自solidworks教程网-http://gocae.com/4020.html
薄膜压力传感器的主要参数有,量程(如0-10KG),响应起值点(如100g以上才能检测到),响应时间(如< 1ms)等等。文章源自solidworks教程网-http://gocae.com/4020.html
当然,还有其他参数如产品尺寸、储存温度及工作温度、寿命等常规参数,相信从事产品结构设计的工程师根据自己的经验也可以列举出来,这里就不一一说明了。下面放上一张在网上找的图片。文章源自solidworks教程网-http://gocae.com/4020.html
 文章源自solidworks教程网-http://gocae.com/4020.html
文章源自solidworks教程网-http://gocae.com/4020.html
常见问题
柔性薄膜压力传感器使用常见问题:文章源自solidworks教程网-http://gocae.com/4020.html
[1]力感柔性传感器如何反馈压力?电阻是否恒定,还是以恒定值递减?
力感柔性传感器是电阻式的,力越大,电阻越小。文章源自solidworks教程网-http://gocae.com/4020.html
[2]在不损坏传感器的情况下可以加载多大压力?
虽然聚合物大约10,000 PSI(69N/m㎡)的压力下才会损坏,但我们通常建议传感器的压力要比此极限压力小的多,建议压力在10N/m㎡以下。文章源自solidworks教程网-http://gocae.com/4020.html
[3]什么材料/条件可能会损坏传感器?
温度>215℃、水泡、锋利的物体、剪切力和压力大于10N/m㎡可能会损坏传感器。
[4]可以折叠传感器吗?
虽然传感器是柔性的,但是折叠压敏有效区域可能会导致导线断裂。建议不要弯曲90°以上。
[5]可以将传感器粘贴到物体表面吗?
可以的,建议使用双面胶带将传感器粘贴在物体表面。通常传感器带有这样的双面胶。
[6]传感器贴在什么样的表面最佳?
平坦,光滑的表面最佳。潮湿气体或污垢颗粒可能导致传感器出现假触发。
[7]力感柔性传感器可以使用多大的电压驱动?
力感柔性传感器就像无源电阻。任何电压都可以。通常是0.1V到5V。
[8]传感器的电阻范围是多少?
空载时,传感器的电阻大于1MΩ,满载时大约为400Ω。
[9]在重新触发传感器前,必须释放多长时间?
没有时间限制。
[10]力感柔性传感器是否防水?
力感柔性传感器材料不建议与直接液体接触。传感器需要做防水处理。
[11]湿度对传感器有什么影响?
有影响,所有的极端环境影响中湿度导致的变化最大。极高的湿度,例如85°RH在85℃几百小时,会导致电阻发生很大的变化。
[12]传感器可以实现的最小感应区域是多少?
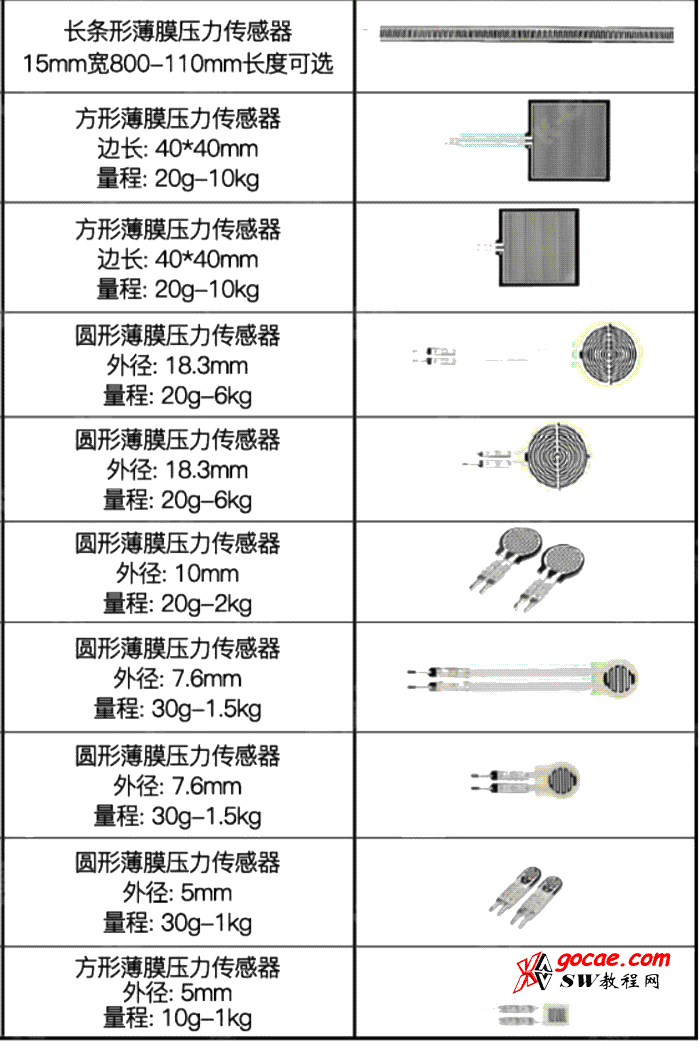
传感器的最小尺寸可以是5mm(3mm感应区域)。
[13]定制的费用是多少?
根据具体需求而定,具体取决于尺寸,设计复杂程度,压力感应范围,数量等。
请联系客服,我们将为您提供专业的服务。
[14]定制传感器的开发周期是多长?
基于先进的柔性供应链管理,定制传感器的开发周期最快可在2-3周完成。
请告知您的详细需求,专业的工程师将尽快为您服务。
[15]传感器的应用是什么?
传感器为各种压力感测应用提供经济的解决方案和OEM物料。我们的传感器已经集成到医疗、工业控制,运动和健康、可穿戴设备等中。
使用注意点
[1]尽量请安装传感器在坚固,平整和平滑的表面。
[2]如果将力感柔性传感器应用于曲面,请小心使用。当传感器的两层被弯曲张力强制接触时,可能会发生传感器的预载。传感器仍将起作用,但动态范围可能会降低,并可能发生电阻漂移。
[3]将传感器贴到任何表面时,请避免气泡和污染。只能使用薄和均匀的粘合剂,如3M品牌双面层压粘合剂。覆盖传感器的整个表面。
[4]注意有效区域的扭结或凹痕。它们可能导致传感器的错误触发。
[5]请保护设备免受尖锐物体的伤害。使用覆盖层,如聚碳酸酯薄膜或弹性体保护。
[6]在需要-些运动的设计中,请使用软橡胶或弹簧作为触发机构的一部分。
[7]不要使用氰基丙烯酸酯粘合剂和助焊剂去除剂,这些材料会降解基材拼导致开裂。
[8]每平方厘米不要超过1mA的电流。这可能会损坏传感器。