

CN204381941U龙门丝杆机构
机床设备是工程加工过程中常用的工具,机床设备根据不同的产品和对象需要实现复杂的加工动作,其中,直线进给动作是最基本的加工动作。
直线进给可以通过气动活塞缸或者液动活塞缸实现,还可以通过电机驱动实现。但是,当直线进给的行程较大时,气动活塞缸和液动活塞缸的活塞很长,需要的安装空间很大,不利于工艺布局。文章源自solidworks教程网-http://gocae.com/3707.html
 文章源自solidworks教程网-http://gocae.com/3707.html
文章源自solidworks教程网-http://gocae.com/3707.html
因此,目前电机与丝杆传动机构是实现直线进给的常用方式,在此类机床设备中,丝杆是机床设备必不可少的传动部件,丝杆可将电机的旋转动力转化为直线动力向外输出,使输出装置实现直线运动。但是,较长的丝杆会存在中部下坠的隐患,对丝杆的刚性和直线度要求非常高,导致丝杆生产难度很大。基于上述情况,我们有必要设计一种直线度较高的丝杆机构。文章源自solidworks教程网-http://gocae.com/3707.html
 文章源自solidworks教程网-http://gocae.com/3707.html
文章源自solidworks教程网-http://gocae.com/3707.html
通过在龙门丝杆下方设置丝 杆托架,实现对龙门丝杆的可靠支撑,有效避免龙门丝杆的中部下坠异常,提高机床设备的 加工精度。文章源自solidworks教程网-http://gocae.com/3707.html
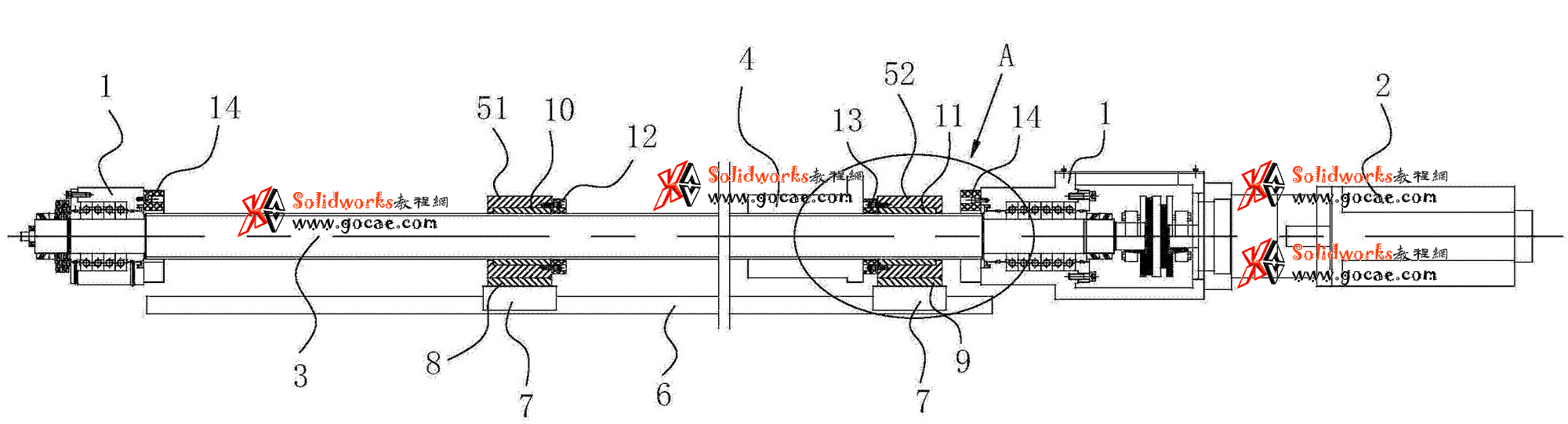
 龙门丝杆3 机构,包括两个丝杆支座 1 和可 转动地安装在丝杆支座 1 上的龙门丝杆 3,龙门丝杆 3 的一端设置有驱动龙门丝杆 3 转动的 丝杆电机 2,龙门丝杆 3 的下方并位于两个丝杆支座 1 之间设置有用于支撑龙门丝杆 3 的丝 杆托架 5。文章源自solidworks教程网-http://gocae.com/3707.html
龙门丝杆3 机构,包括两个丝杆支座 1 和可 转动地安装在丝杆支座 1 上的龙门丝杆 3,龙门丝杆 3 的一端设置有驱动龙门丝杆 3 转动的 丝杆电机 2,龙门丝杆 3 的下方并位于两个丝杆支座 1 之间设置有用于支撑龙门丝杆 3 的丝 杆托架 5。文章源自solidworks教程网-http://gocae.com/3707.html
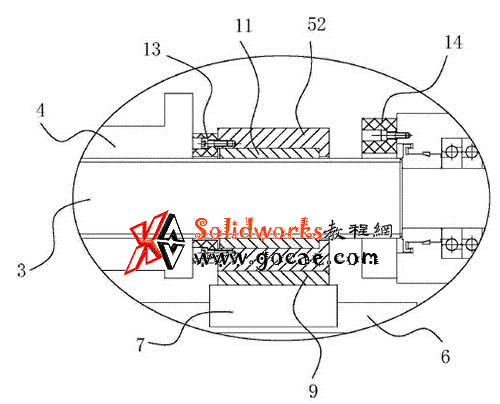
通过在龙门丝杆 3 下方设置丝杆托架 5,实现对龙门丝杆 3 的可靠支撑,有效避 免龙门丝杆 3 的中部下坠异常, 提高机床设备的加工精度。龙门丝杆 3上螺纹旋接有可沿龙门丝杆 3的轴线方向移动的丝杆螺母 4,丝杆托架 5 包括相对设置且相互联动的第一托架 51 和第二托架 52,第一托架 51 和第二托架 52 分别 位于丝杆螺母 4 的两侧,第一托架 51 与第二托架 52 之间通过两根托架连杆 53 固定连接。 第一托架 51 套设在龙门丝杆 3 上,第一托架 51 与龙门丝杆 3 之间嵌入有可自润滑的第一 滑套 10 ;第二托架 52 套设在龙门丝杆 3 上,第二托架 52 与龙门丝杆 3 之间嵌入有可自润滑 的第二滑套 11。文章源自solidworks教程网-http://gocae.com/3707.html
 文章源自solidworks教程网-http://gocae.com/3707.html
文章源自solidworks教程网-http://gocae.com/3707.html
通过设置第一滑套 10 和第二滑套 11,使第一托架 51 和第二托架 52 可在 龙门丝杆 3 上滑动,以避免与丝杆螺母 4 干涉。当第一托架 51 和第二托架 52 受到丝杆螺 母 4 的挤压力时,跟随丝杆螺母 4 移动,在整个移动过程中,第一托架 51 和第二托架 52 一 直保持对龙门丝杆 3 的支撑。第一托架 51 与第二托架 52 的距离等于两个丝杆支座 1 之间距离的一半。当第一 托架 51 移动至靠近丝杆支座 1 一侧时,第二托架 52 移动至龙门丝杆 3 的中部,对龙门丝杆 3 进行有效支撑 ;当第二托架 52 移动至靠近丝杆支座 1 一侧时,第一托架 51 移动至龙门丝 杆 3 的中部,对龙门丝杆 3 进行有效支撑。文章源自solidworks教程网-http://gocae.com/3707.html
 文章源自solidworks教程网-http://gocae.com/3707.html
文章源自solidworks教程网-http://gocae.com/3707.html
第一托架 51 靠近丝杆螺母 4 的一端设置有选择性与丝杆螺母 4 抵接的第一限位 块 12,第二托架 52 靠近丝杆螺母 4 的一端设置有选择性与丝杆螺母 4 抵接的第二限位块 13,避免丝杆螺母 4 与第一限位块 12 或者第二限位块 13 直接抵接造成损坏。两个丝杆支 座 1 相对的一端分别设置有选择性与第一托架 51 或者第二托架 52 抵接的支座限位块 14, 避免第一托架 51 和第二托架 52 与丝杆支座 1 直接抵接造成损坏。
龙门丝杆 3 的正下方设置有线性导轨 6,线性导轨 6 与龙门丝杆 3 平行设置,线性 导轨 6 的长度大于两个丝杆支座 1 之间的距离,第一托架 51 和第二托架 52 均与线性导轨 6 滑动连接。线性导轨 6 的长度等于两个丝杆支座 1 之间的距离。
第一托架 51 和第二托架 52 分别通过托架滑块 7 安装在线性导轨 6 上,托架滑块 7 与线性导轨 6 滑动连接。第一托架 51 与托架滑块 7 之间设置有可调节第一托架 51 高度 的第一调整垫片 8,第二托架 52 与托架滑块 7 之间设置有可调节第二托架 52 高度的第二调 整垫片 9。
具体地,第一调整垫片 8 和第二调整垫片 9 可分别单独对第一托架 51 和第二托 架 52 的高度进行调节,从而使第一托架 51 和第二托架 52 对龙门丝杆 3 提供可靠的支撑, 避免龙门丝杆 3 中部下坠,保证龙门丝杆 3 的直线度。