

在机械自动化领域,往往需将产品从一个位置转移到另一个位置,并使其旋转一定角度,以便进行下一道加工工序,例如把产品由一位置的水平状态转换成另一位置的竖直状态。举例来说,在注塑自动化领域,常常利用注塑机专用取件机械手将产品从注塑机模具中取出,再由专门的治具翻转机构将产品旋转一定角度之后放置到输送带、产品放置框或者下一道工位上,或者与之相反,利用上述的治具翻转机构把待加工件从输送带或其他工位转移到机械手治具端。
 文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html
为了解决这个需求,现有技术中常采用的方法是使用两个电机或气缸等驱动装置,一个旋转驱动实现翻转功能,另一个直线驱动实现前进后退功能,然而这种翻转机构成本较高,结构较为复杂,动作不够灵活,占用空间也较大,动作周期较长。现有技术中还有另一种典型的结构型式为机械手侧姿结构,利用气缸的伸缩带动旋转板转动,但此类结构往往只能实现单一的旋转动作,且旋转空间较为有限,需配合机械手臂前后上下平移,因此占用空间大,受到机器结构、高度、大小的限制且角度不可调,动作也不够灵活。 文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html
专门组合于、或配置于、或专门适用于机床有关的工件操纵装置,如用于运送、加料、定位、卸下、分级的的技术领域,特别涉及一种利用系统的相对旋转运动以减少电机数量并实现输出轴上的旋转板旋转动作的治具翻转装置。文章源自solidworks教程网-http://gocae.com/3066.html
自动化机器人夹具翻转装置
 文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html
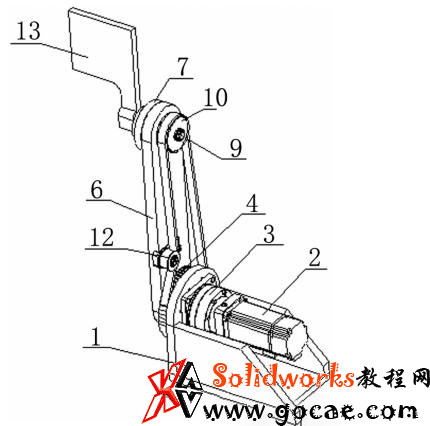
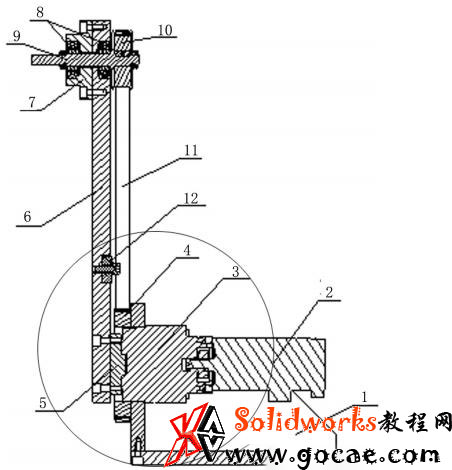
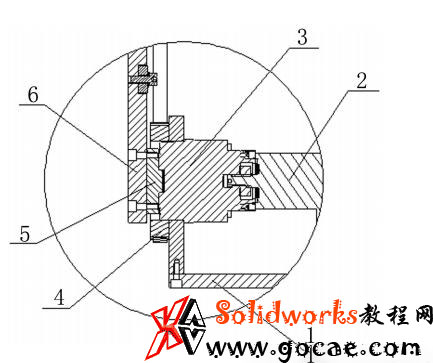
包括固定座1,固定座1上设有驱动机构,驱动机构的输出端处同轴设有定同步带轮4和过渡圆盘法兰5,定同步带轮4固定设于固定座1上,过渡圆盘法兰5连接至摆臂6的下部,摆臂6的上部设有输出轴9,输出轴9一端同轴设有动同步带轮10,定同步带轮4和动同步带轮10设于摆臂6同侧,定同步带轮4和动同步带轮10通过同步带11连接,定同步带轮4的分度圆直径是动同步带轮10的分度圆直径的2倍;输出轴9相对于动同步带轮10的一端设有旋转板13。文章源自solidworks教程网-http://gocae.com/3066.html
 文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html
在固定座1上的驱动机构的输出端处同轴设置定同步带轮4和过渡圆盘法兰5,并将定同步带轮4固定在固定座1上,保证定同步带轮4相对于固定座1是不动的;文章源自solidworks教程网-http://gocae.com/3066.html
 文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html
驱动机构的输出端通过过渡圆盘法兰5连接摆臂6,使得驱动机构在作业时可以带动摆臂6转动,同时在摆臂6的上部设置输出轴9,输出轴9一端设置与定同步带轮4通过同步带11配合设置的动同步带轮10,另一端设置旋转板13,且定同步带轮4的分度圆直径是动同步带轮10的分度圆直径的2倍,即当摆臂6转动时,同步带11会沿着定同步带轮4进行转动,当同步带11绕定同步带轮4摆动∠α时,动同步带轮10相对摆臂6转过的角度是2∠α,考虑相对运动,最终旋转板13相对固定座1的旋转角度为2∠α-∠α=∠α,旋转方向上,旋转板13和摆臂6的旋转方向正好相反,实现旋转板13既翻转又移动的效果。文章源自solidworks教程网-http://gocae.com/3066.html
文章源自solidworks教程网-http://gocae.com/3066.html