

近年来,我国制造业所生产的产品向大型及超大型方向发展 , 零件的精度向高精度方向发展,由此引发各类数控机床向大型、重型、超重型及超大型方向迅猛发展,特别是航空、航天、风电、核电等行业对大型、特大型精密数控机床的需求越来越多。文章源自solidworks教程网-http://gocae.com/3184.html
 文章源自solidworks教程网-http://gocae.com/3184.html
文章源自solidworks教程网-http://gocae.com/3184.html
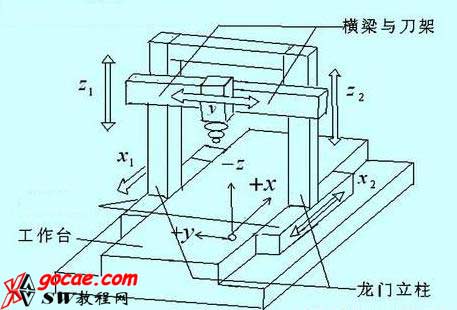
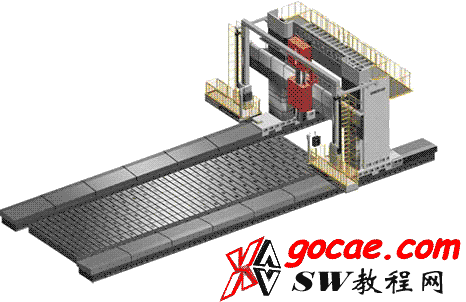
数控动梁式龙门机床由于加工范围广受到市场青睐,可横梁在移动过程中,横梁通过左右立柱的滚珠丝杠带动,要满足大的磨削范围,保证高的磨削进度,就要保证横梁能在垂直方向上准确定位。文章源自solidworks教程网-http://gocae.com/3184.html
 文章源自solidworks教程网-http://gocae.com/3184.html
文章源自solidworks教程网-http://gocae.com/3184.html
但由于双驱同步结构中的电机、丝杠等部件从出厂即有特性上的差异,加上其他非线性因素,如摩擦力不同、负载运动、环境因素等的影响,使龙门框架的移动不能保证一致性,即产生两同步轴的不同步误差。文章源自solidworks教程网-http://gocae.com/3184.html
 文章源自solidworks教程网-http://gocae.com/3184.html
文章源自solidworks教程网-http://gocae.com/3184.html
同时,横梁这种大型移动部件造成的机械耦合受到不同步误差的影响会引起两轴的拉扯,从而进一步影响不同步误差。需要建立双轴同步控制模型,对两个伺服电机设置合理的参数,并且对两根轴进行逻辑补偿。文章源自solidworks教程网-http://gocae.com/3184.html
 文章源自solidworks教程网-http://gocae.com/3184.html
文章源自solidworks教程网-http://gocae.com/3184.html
横梁的水平度如何保证,除了良好的机械保证,设计一套电子式自动调平装置显得非常重要。 数控龙门机床动梁式龙门及其栋梁水平状态控制方法,其包括两个立柱、固定顶梁和两端通过滚珠丝杠运动副安装在两个立柱上的动梁,顶梁的两端各装有一个独立的伺服电机、滚珠丝杠运动副和位置光栅尺并分别组成一个闭环控制单元,两侧的闭环控制单元分别通过数据总线与机床的数控系统连接并形成一个全闭环伺服控制系统,通过两侧的闭环控制单元实现动梁的动态水平调整,其不足是 :一是由于在动梁两端使用两个独立的全闭环伺服控制系统,两个全闭环伺服控制系统中的两个光栅尺的性能在出厂时通常有一定的公差,且,在安装时存在人为安装误差,致使龙门框架的移动不能达到水平状态,即产生两同步轴的不同步误差,由此影响了机床的加工精度。 solidworks教程网致力于提供机械的行业技术 ,为行业人士建立和拓展全技术能力提供技术服务,是机械行业一个跨屏技术互动应用系统。更多行业技术请关注微 solidworks教程网文章源自solidworks教程网-http://gocae.com/3184.html
 文章源自solidworks教程网-http://gocae.com/3184.html
文章源自solidworks教程网-http://gocae.com/3184.html
数控动梁龙门机床横梁水平自动调整装置
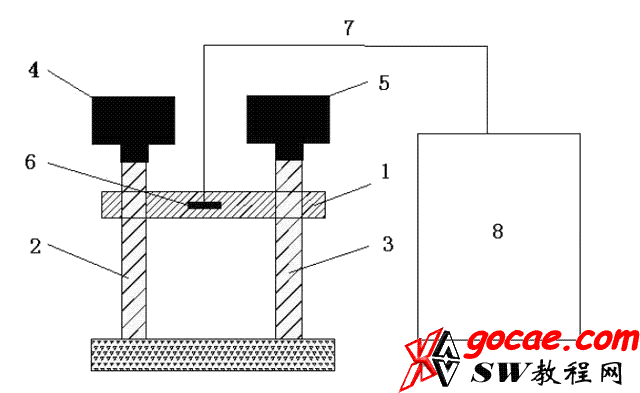
设有横梁和控制系统,横梁一端与左立柱上的左滚珠丝杠相连接,另一端与右立柱上的右滚珠丝杠相连接,左滚珠丝杠经左伺服电机驱动,右滚珠丝杠经右伺服电机驱动,左伺服电机和右伺服电机分别与控制系统相连接,横梁中心水平设有电子水平仪,电子水平仪经通讯线与数控控制系统相连接,以利于通过电子水平仪的光电原理,以平静液面为水平面,自动实时测量横梁偏离水平面的倾斜方向和倾斜角度,并将其转化为数字信号传递给控制系统中的计算机,再通过控制系统中的显示屏将计算机中的误差值显示出来,同时,控制系统调用自动平衡程序,指令横梁较低一端的左伺服电机或右伺服电机动作,带动左滚珠丝缸或右滚珠丝杠旋转,进而使横梁的静态和动态的水平始终保持一致性,大大提高了机床的加工精度。

当横梁 1 倾斜到影响加工精度时,电子水平仪根据附图 所示,在长度为 L 的横梁 1 上距离一端 a 处受到压力 P, 横梁 1 则在 x1,x2 处产生变形电子水平仪 6 产生电位差,输出偏差值,该偏差值传输给控制系统 8 中对应的宏变量,控制系统 8根据读取的宏变量值的正负性判断左立柱 2 和右立柱 3 的高低状态,控制系统 8 采用高端固定低端调整的方式实现水平调整,较低一边的左伺服电机 4 或右伺服电机 5 带动左滚珠丝杠或右滚珠丝杠作定量旋转,然后通过电子水平仪 6 继续判断横梁 1 是否在要求的水平范围内,否则继续定量旋转,直到实现横梁 1 的自动调平。采用上述结构,能自动实时监控横梁的水平精度、实现横梁动态和静态水平精度的一致性,具有结构新颖、调整简单、加工精度高等优点。

