

SOLIDWORKS2016在装配体方面做了很大的改进增强,从“关联工具栏提供的快速配合”选项到“子装配体随配合快速复制粘贴”功能,从“零部件预览窗口的添加”到“快速删除无用的特征或零件”,这些改进都使我们获得更好的用户体验,更便捷的帮助我们去处理工作。
一、关联工具栏提供的快速配合选项文章源自solidworks教程网-http://gocae.com/1570.html
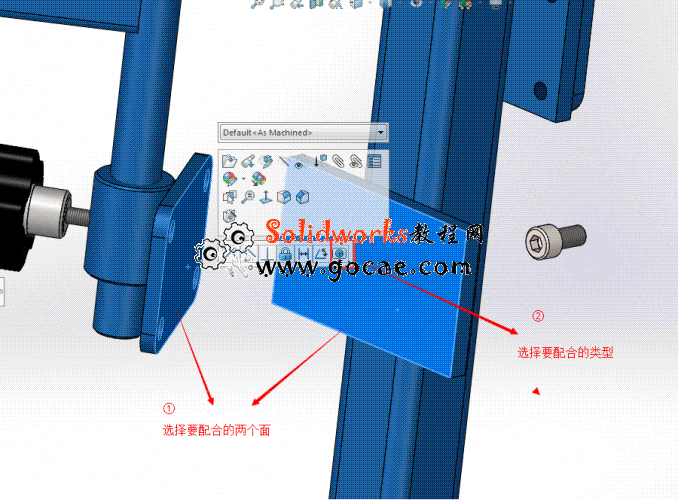
如下图所示,当我们要对两个面添加“轮廓中心配合”时,我们只需先选中两个面,在关联工具栏中就会出现“轮廓中心配合”选项,这样我们就可以对两个零件快速的添加“轮廓中心配合”。
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html
如下图所示,当我们要对两个零件添加“宽度配合”时,我们只需先选中四个面,在关联工具栏中就会出现“宽度配合”选项,这样我们就可以对两个零件快速的添加“宽度配合”
二、子装配体随配合快速复制粘贴文章源自solidworks教程网-http://gocae.com/1570.html
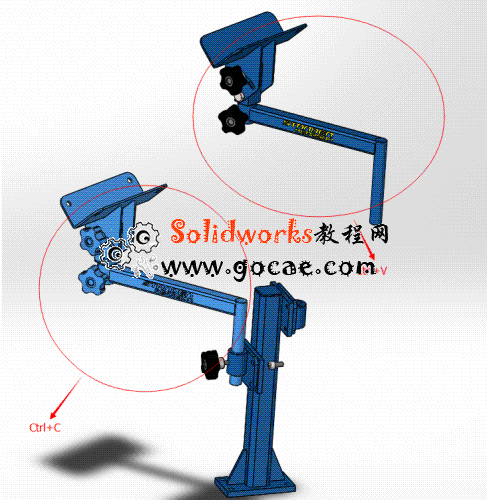
在总装配体中,当我们想将一些零件复制粘贴出来时,以往的SOLIDWORKS是不会记录复制粘贴零件间的配合关系的,那么在SOLIDWORKS2016中,我们可以将带多个带配合关系的零件Ctrl+C Ctrl+V进行复制粘贴,而且配合关系也会随零件一同复制
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html
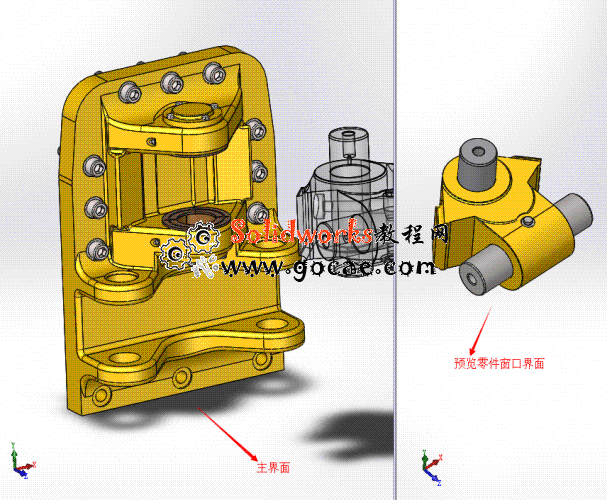
三、零部件预览窗口的添加文章源自solidworks教程网-http://gocae.com/1570.html
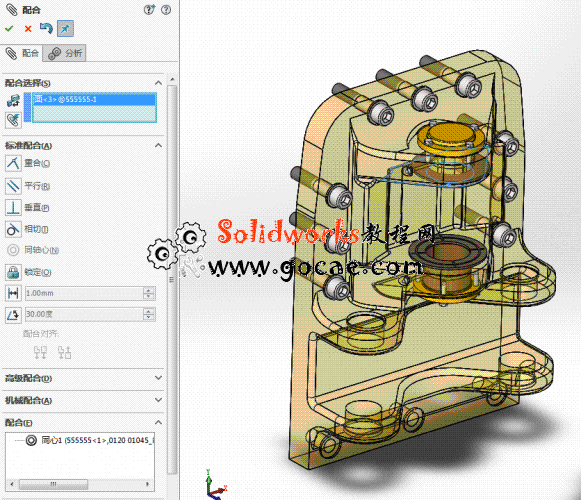
1、配合过程中,第一个选择的零件会进行透明化显示,这样不会因为干涉或角度问题影响我们去选择配合面。
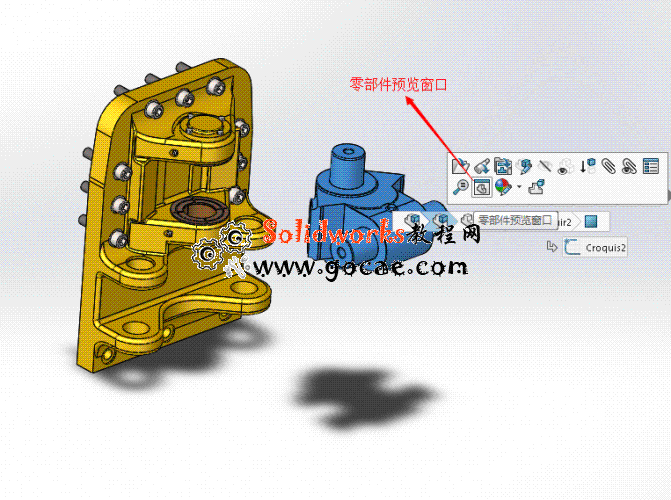
2、为了使配合更加直观,我们可以选择某个零件或者子装配体在单独窗口打开,对其进行配合
配合过程中,我们可以去右边预览窗口选取要配合的面,在主界面选择要配合的面。
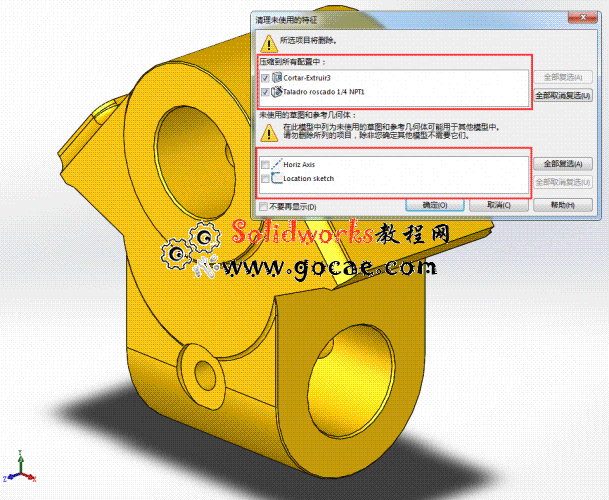
四、快速删除无用的特征和零件
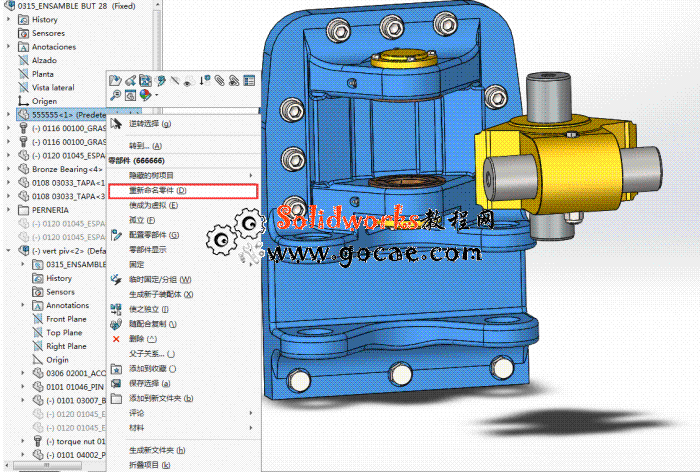
1、在零部件建模过程中,往往会出现一些特征或者基准面创建出来但是并没有使用的情况,这时,我们可以“清理未使用的特征”选项来清理掉相关特征及参考几何体
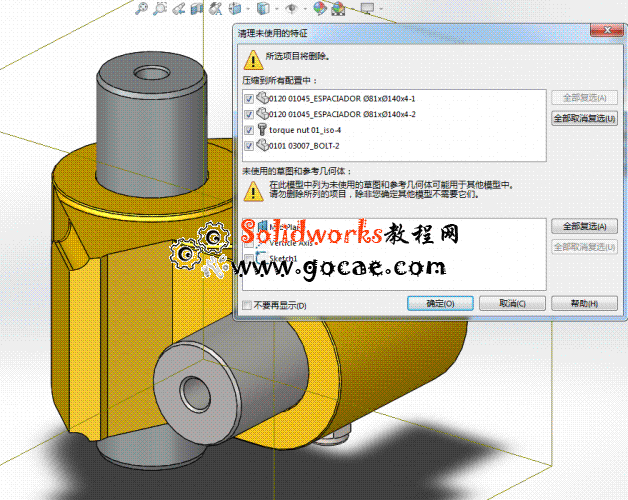
2、在装配体中,我们可以“清理未使用的特征”来清理装配体中未使用的零部件及参考几何体等。
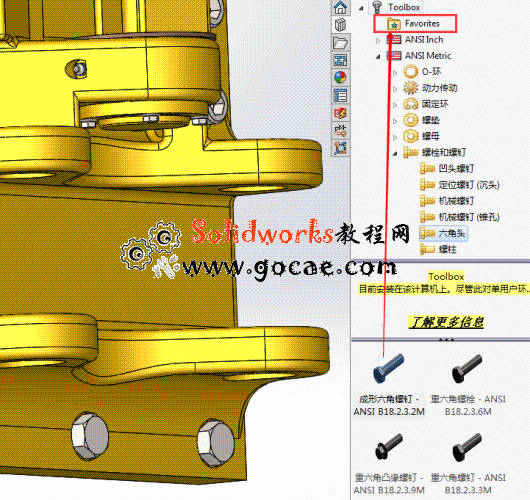
五,Toolbox 新增功能
1、SOLIDWORKS2016 Toolbox新增了My Favorite文件夹,用户可将常用的标准件添加到My Favorite中以方便客户应用使快速调取
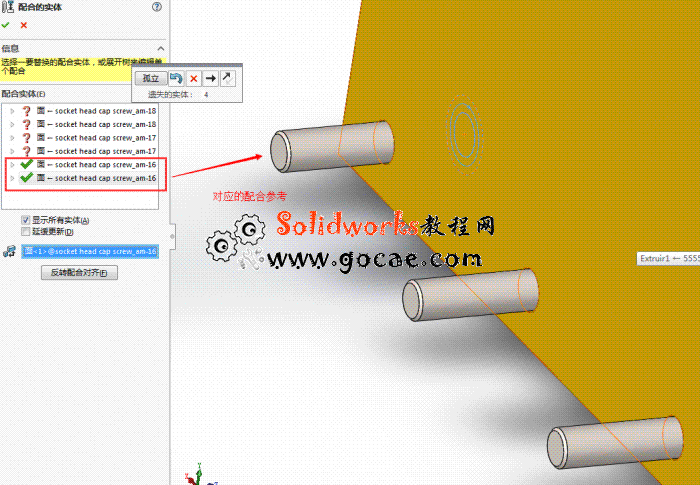
 2、在替换Toolbox标准件时,为替换后的标准件添加配合参考,只需添加其中一个标准件的配合参考,其他的零件都会自动添加。
2、在替换Toolbox标准件时,为替换后的标准件添加配合参考,只需添加其中一个标准件的配合参考,其他的零件都会自动添加。
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html
六、装配体特征树下的零部件可直接修改名称
作为SOLIDWORKS新功能最大的亮点之一,我们可以直接在装配体界面中,对其子零件进行名称的修改,这样,更方便了我们对设备零件名称的统一管理。
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html
七、配合控制器
当我们在做一些配合的时候,尤其是6轴机器人,在装配体中转动或者动画时,机器人的动作很难加以控制,那么SOLIDWORKS2016引入了全新的配合控制器,它使机器人运动变的简单方便。
1、我们可以调整各部位的配合的值来确定机器人位置。
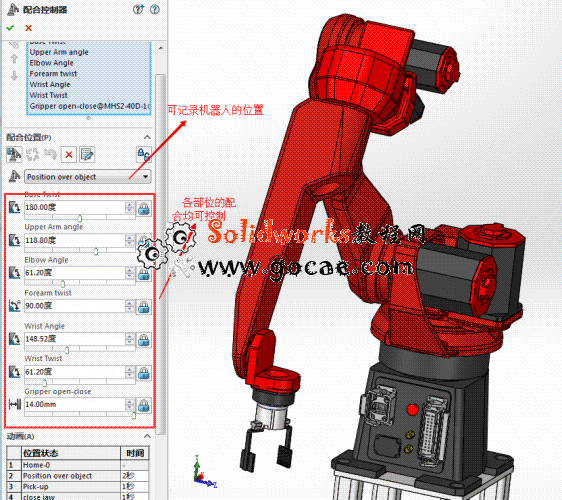
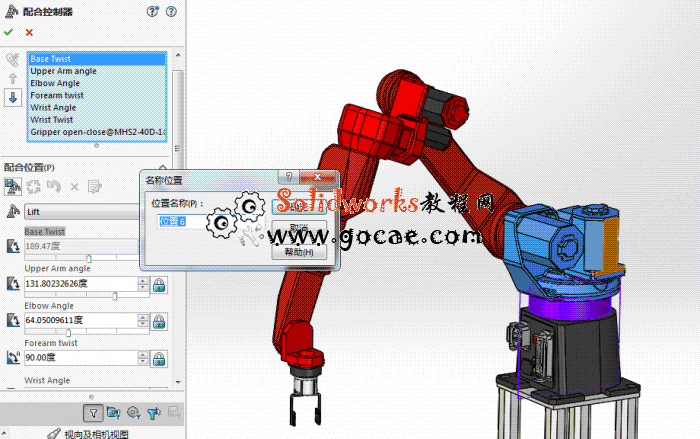
2、当调整好值的时候,我们可以点击“配合位置”下方的保存图标,将我们刚刚设置好的位置保存到配合控制器中。
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html
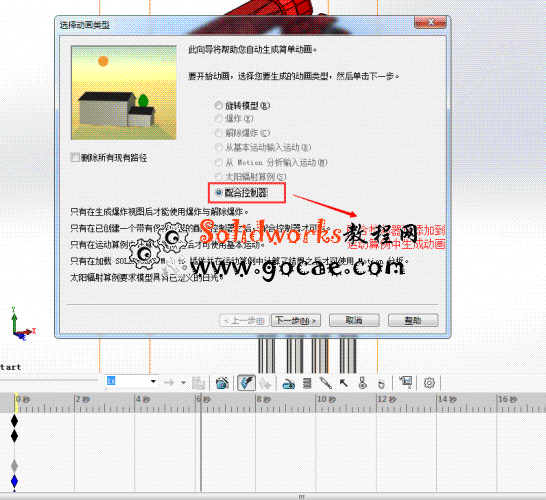
3、通过记录好的每个位置,通过软件自行计算,可得我们想要的动画,并可生成运动算例中的时间和位置帧数。
 文章源自solidworks教程网-http://gocae.com/1570.html
文章源自solidworks教程网-http://gocae.com/1570.html